I am currently a visiting researcher at Princeton University to collaborate with Prof. Jaime Fisac on Safe RL for humanoid robots.
I am honored to receive Viterbi Fellowship and AME Department Fellowship from USC. I am fortunate to collaborate with Prof. Nikolay Atanasov (UC San Diego), Dr. Guillaume Bellegarda (EPFL, Switzerland), and Dr. Thai Duong (Rice University).
[Mar 2026] Our paper on martial-art-inspired standing-up maneuvers has been submitted to IROS 26
[Jan 2026] I started my appointment as visiting researcher at Princeton University to develop Safe Reinforcement Learning framework for humanoid locomotion.
[Jun 2025] I started my job as robotic researcher and software engineer at Ghost Robotics to develop solution for enhancing robustness and agility for legged locomotion.
[May 2025] I will present 3 papers at ICRA 2025. See you in Atlanta!.
[Feb 2025] I started my research scientist internship at Field AI to build up solution for last-mile package delievery for Amazon using legged robots.
My research spans optimization, control, and learning-based approaches for dynamic robotics, including trajectory optimization, reinforcement learning, supervised learning, and real-time optimization-based control.
During my Ph.D. studies, I have focused on enhancing the agility and robustness of legged locomotion.
I am also interested in game theory and the control of multi-agent dynamical systems.
Chuong Nguyen*, Lingfan Bao*, Quan Nguyen
ICRA 2025. *Equal contribution pdf /
video
Achieving precise target jumping with legged robots
poses a significant challenge due to the long flight phase and
the uncertainties inherent in contact dynamics and hardware.
Forcefully attempting these agile motions on hardware could
result in severe failures and potential damage. Motivated by these
challenging problems, we propose an Iterative Learning Control
(ILC) approach that aims to learn and refine jumping skills from
easy to difficult, instead of directly learning these challenging
tasks. We verify that learning from simplicity can enhance safety
and target jumping accuracy over trials. Compared to other ILC
approaches for legged locomotion, our method can tackle the
problem of a long flight phase where control input is not available.
In addition, our approach allows the robot to apply what it learns
from a simple jumping task to accomplish more challenging tasks
within a few trials directly in hardware, instead of learning from
scratch.
Scott Beck*, Chuong Nguyen*, Thai Duong, Nikolay Atanasov, Quan Nguyen
ICRA 2025. *Equal contribution pdf /
video /
code
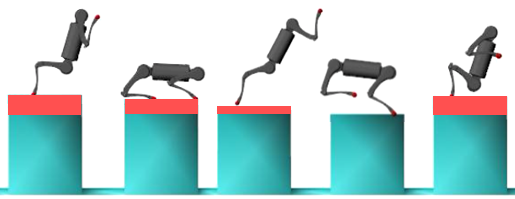
Performing acrobatic maneuvers involving long
aerial phases, such as precise dives or multiple backflips from
significant heights, remains an open challenge in legged robot
autonomy. Such aggressive motions often require accurate state
predictions over long horizons with multiple contacts and
extended flight phases. We propose a novel whole-body
TO method using variational integration (VI) and full-body
nonlinear dynamics for long-flight aggressive maneuvers. Compared to traditional Euler-based TO, our approach using VI
preserves energy and momentum properties of the continuous
time system and reduces error between predicted and executed
trajectories by factors of between 2 − 10 while achieving
similar planning time. We successfully demonstrate long-flight
triple backflips on a quadruped A1 robot model and backflips
on a bipedal HECTOR robot model for various heights and
distances, achieving landing angle errors of only a few degrees.
Robust Walking with High Payload on Humanoid Robots
Chuong Nguyen,
[In preparation]
Realizing robust walking on unknown and rough terrain while carrying payloads is highly challenging for humanoid locomotion.
Such motions often require both accurate whole-body coordination and real-time feedback control.
To tackle this challenge, we utilize a framework combining the advantage of whole-body control (WBC) and model predictive control (MPC).
The framework is validated on a humanoid robot with 29 degrees of freedom. We achieve robust walking at a speed of 1.5 m/s on uneven terrain while carrying a payload of 8 kg.
The first ever double barrel roll achieved by A1 robot
Chuong Nguyen, Quan Nguyen
IROS, 2022.
pdf /
video /
arXiv
Performing highly agile acrobatic motions with a long flight phase requires perfect timing, high accuracy, and coordination of the full-body motion.
To address these challenges, we present a novel approach on timings and trajectory optimization framework for legged robots performing aggressive 3D jumping.
In our method, we firstly utilize an effective optimization framework using simplified rigid body dynamics to solve for contact timings and a reference trajectory of the robot body.
The solution of this module is then used to formulate a full-body trajectory optimization based on the full nonlinear dynamics of the robot.
This combination allows us to effectively optimize for contact timings while ensuring that the jumping trajectory can be effectively realized in the robot hardware.
We first validate the efficiency of the proposed framework on the A1 robot model for various 3D jumping tasks such as double-backflips off the high altitude of 2m.
Experimental validation was then successfully conducted for various aggressive 3D jumping motions such as diagonal jumps, barrel roll, and double barrel roll from a box of heights 0.4m and 0.9m, respectively.
Chuong Nguyen, Lingfan Bao, Quan Nguyen
CDC, 2022.
pdf /
video
Performing highly agile dynamic motions, such as
jumping or running on uneven stepping stones has remained
a challenging problem in legged robot locomotion. This paper
presents a framework that combines trajectory optimization
and model predictive control to perform robust and consecutive
jumping on stepping stones. In our approach, we first utilize
trajectory optimization based on full-nonlinear dynamics of
the robot to generate periodic jumping trajectories for various
jumping distances. A jumping controller based on a model
predictive control is then designed for realizing smooth jumping
transitions, enabling the robot to achieve continuous jumps on
stepping stones. Thanks to the incorporation of MPC as a
real-time feedback controller, the proposed framework is also
validated to be robust to uneven platforms with unknown height
perturbations and model uncertainty on the robot dynamics.
Chuong Nguyen , Huy Dao, Loc Pham, Truong Nguyen, Quan Nguyen
IROS 26 (submitted),
In this paper, we propose
a hierarchical framework combining trajectory optimization
(TO) and deep reinforcement learning (DRL) to generate
martial-art-inspired standing-up motions for full-sized humanoids. In the first stage, TO with full-body dynamics
produces dynamically feasible recovery motions that bring
the robot from lying configurations to squat postures while
respecting actuator limits and kinematic constraints. These
trajectories encode coordinated multi-contact motions, phase
timing, and recovery configurations. In the second stage, a
DRL policy learns squat-to-stand behaviors that handle hard
impacts, contact transitions, and variations in squat configurations,
while maintaining robustness to terrain uncertainties and
external disturbances. We validate the proposed framework on
a 50 kg, 1.65 m full-sized humanoid robot, VinMotion M2,
demonstrating highly dynamic, martial-arts-inspired standing-
up maneuvers that reach an upright posture in approximately
1–2 seconds depending on terrain conditions.
Chuong Nguyen , Abdullah Altawaitan, Thai Duong, Nikolay Atanasov, Quan Nguyen
Robotics and Automation Letters (RAL) 2024 and ICRA 2025,
pdf /
video /
Code
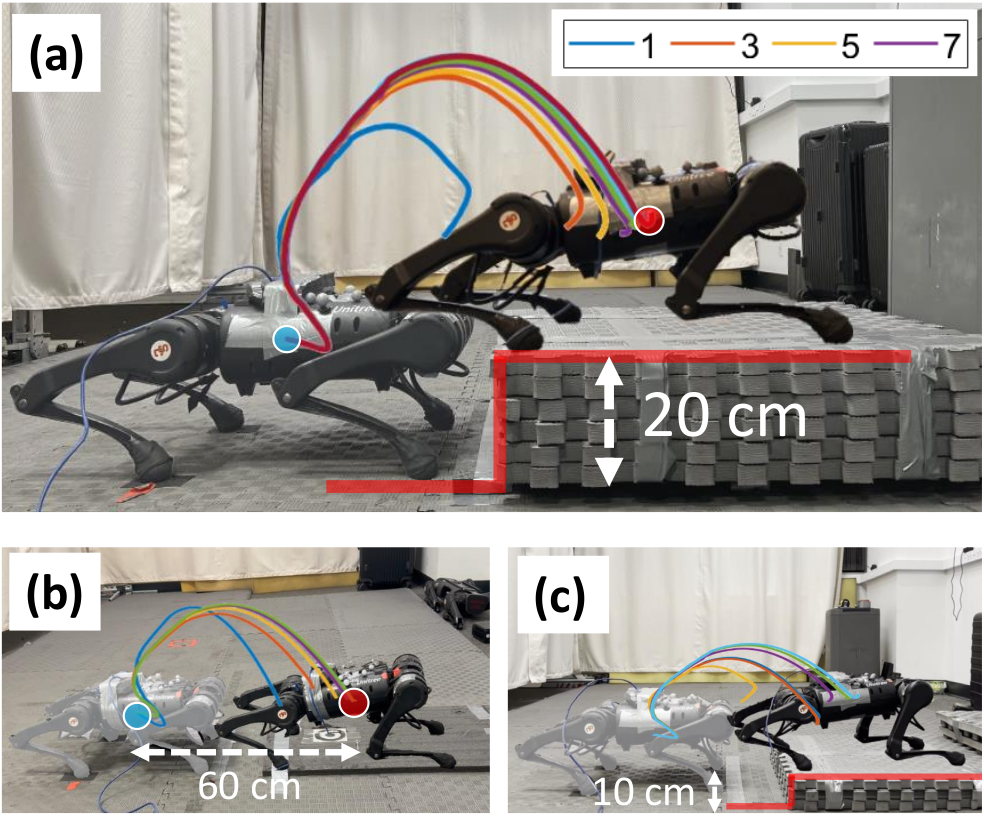
Achieving both target accuracy and robustness
in dynamic maneuvers with long flight phases has been a significant challenge for legged
robots. We propose a novel learningbased control approach consisting of model learning and
model predictive control (MPC) utilizing an adaptive frequency
scheme. We learn a
model directly from experiments, accounting not only for leg
dynamics but also for modeling errors and unknown dynamics mismatch in hardware and during contact.
Additionally, learning the model with adaptive frequency allows us to cover
the entire flight phase and final jumping target, enhancing
the prediction accuracy of the jumping trajectory. Using the
learned model, we also design an adaptive-frequency MPC to
effectively leverage different jumping phases and track the
target accurately.
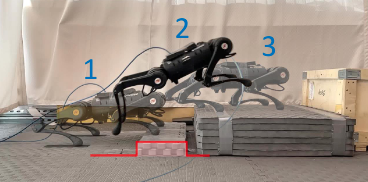
Robustness to environment noise of foot disturbances
Guillaume Bellegarda*,
Chuong Nguyen*, Quan Nguyen
Robotics and Autonomous Systems Journal (RAS), 2024. *Equal contribution,
pdf /
video
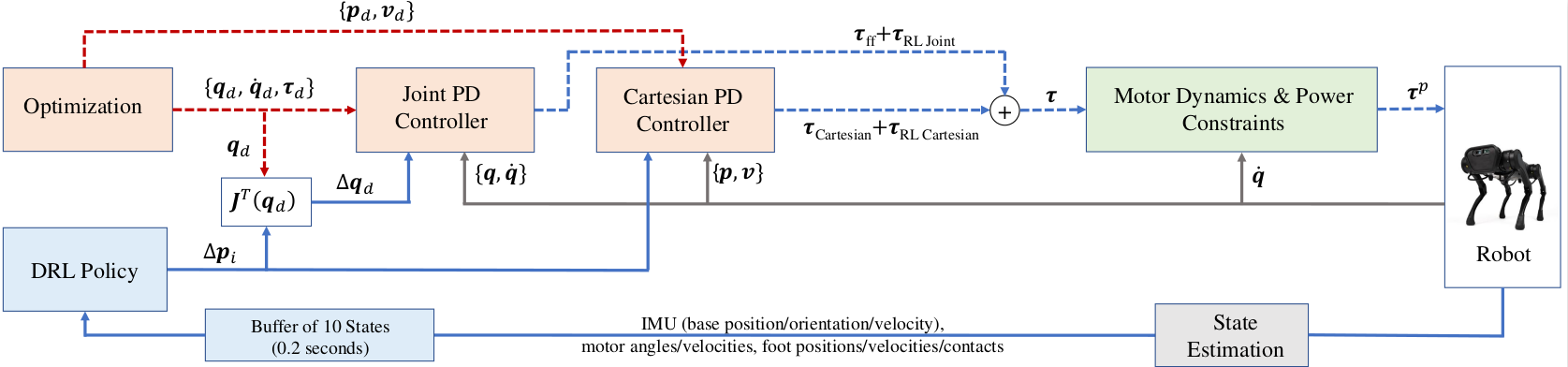
In this paper, we consider a general task of
jumping varying distances and heights for a quadrupedal robot
in noisy environments, such as off of uneven terrain and with
variable robot dynamics parameters. To accurately jump in such
conditions, we propose a framework using deep reinforcement
learning that leverages and augments the complex solution of
nonlinear trajectory optimization for quadrupedal jumping.
While the standalone optimization limits jumping to take-off from
flat ground and requires accurate assumptions of robot dynamics,
our proposed approach improves the robustness to allow jumping
off of significantly uneven terrain with variable robot dynamical
parameters and environmental conditions. Compared with
walking and running, the realization of aggressive jumping on
hardware necessitates accounting for the motors’ torque-speed
relationship as well as the robot’s total power limits. By
incorporating these constraints into our learning framework, we
successfully deploy our policy sim-to-real without further tuning,
fully exploiting the available onboard power supply and motors.
We demonstrate robustness to environment noise of foot disturbances of up to 6 cm in height, or 33% of the robot’s nominal
standing height, while jumping 2x the body length in distance.
Chuong Nguyen , Hyo-Sung Ahn
IEEE Conference on Decision and Control (CDC) 2018,
pdf /
This paper presents a number of ideas combining consensus algorithms and differential inclusions to effectively solve exact potential games with continuous strategy space in a multi-agent network.
Solving these games or finding their Nash equilibrium (NE) is conducted in a distributed manner via the forms of two interconnected subsystems, the first one estimating necessary information by average consensus algorithm, and another using differential inclusion to seek NE with respect to distributed constraints on players' actions.
Firstly, a special form of exact potential games is considered. Secondly, larger potential games are taken into consideration. It is shown that designed dynamical systems are semi-practically globally asymptotically stable (SPA), enabling players' actions to converge to NE non-locally.